معلمات محرك روبوت الكلب
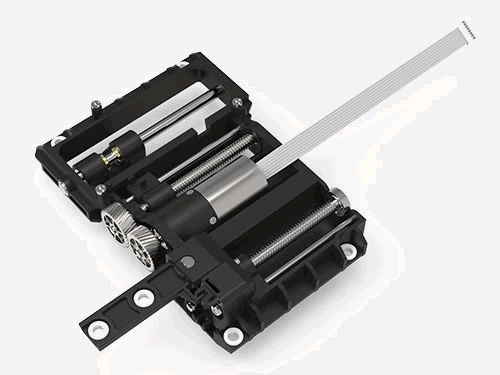
محرك الكلب الآلي عبارة عن نظام نقل محرك تروس صغير يستخدم لمحرك روبوت الكلب الذكي. يتكون هيكل النقل الرئيسي من محرك محرك (محرك صغير) وعلبة تروس (مخفض). يمكن لمحرك مفصل الكلب الآلي أن يقود الكلب الآلي إلى المشي بشكل متكيف. إنها تمكن الكلب الآلي من تسلق المنحدرات والسير على ممر حصى. يمكن التحكم في التحرك للأمام وللخلف وللأعلى وللأسفل وزاوية الانعراج وزاوية الميل وزاوية التدحرج عند المشي على شرفة غير مستوية. يجب تخصيص هذا النوع من المعلمات التقنية ، مثل طاقة الإخراج ، وعزم الدوران الناتج ، والضوضاء ، والدقة ، ووضع نقل علبة التروس ، وأداء محرك الدفع. تلتزم ZHAOWEI Machinery & Electronics Co. ، Ltd بتقديم خدمة تخصيص شاملة.
معلمات Robot Dog Motor:
| مواد | معدن |
|---|---|
| القطر الخارجي | 24 ملم |
| درجة حرارة التشغيل | -20 درجة مئوية ~ + 100 درجة مئوية |
| اتجاه الدوران | cw & ccw |
| رد فعل عنيف جير | ≤3 درجة |
| الجهد (اختياري) | 3 فولت ~ 24 فولت |
| تحمل | تحمل مسامية / تحمل المتداول |
| سرعة الإدخال | ≤15000 دورة في الدقيقة |
| نهاية محورية | ≤0.3 مم / ≤0.2 مم |
| تيار | 300mA كحد أقصى |
| شعاعي الحمل على رمح الإخراج | ≤120N / ≤170N |
| المحركات (اختياري) | السائر / محرك DC |
التخصيص
اسم المشروع: محرك روبوت جوينت
خلفية المشروع: في تفاعل وتفاعل الاستجابة السريعة ، يتم استخدام محرك التيار المستمر للروبوت لقيادة مفاصل الروبوت ، الأمر الذي يتطلب نسبة كبيرة من القوة إلى الكتلة ونسبة عزم الدوران إلى القصور الذاتي ، وعزم دوران مرتفع ، وانخفاض القصور الذاتي ، ونطاق تعديل سرعة واسع وسلس. على وجه الخصوص ، يجب أن يستخدم القابض الآلي محركًا آليًا بحجم وكتلة صغيرين ، وقدرة تحميل زائدة كبيرة في وقت قصير.
الإنجاز: يتم دمج الروبوت مع محرك سيرفو روبوت كوكبي ZHAOWEI ، والذي يمكن أن يحسن بشكل كبير جودة وكفاءة الروبوت. يحتوي محرك التيار المستمر للروبوت على تغييرات في ناقل الحركة على مرحلتين وثلاث مراحل وأربع مراحل. يمكن ضبط نسبة التخفيض وسرعة الإدخال وعزم الدوران لعلبة التروس وفقًا لمتطلبات تصميم محرك الروبوت.