معلمات محرك الجير الآلي
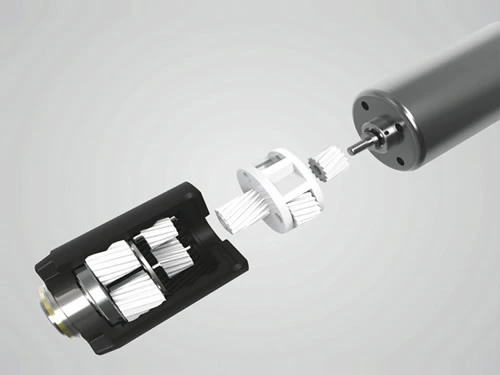
محرك تروس الروبوت هو مزيج من علبة التروس ومحرك روبوت صغير يستخدم للروبوت الذكي. إنه نظام نقل اختزال يتكون من محرك محرك (محرك صغير) وعلبة تروس (مخفض). يتميز محرك الروبوت المصغر بوظيفة التباطؤ وزيادة عزم دوران محرك الروبوت ، والتي يمكن أن تمكن الروبوت من التحرك والمشي. على سبيل المثال ، يمكن استخدام محرك DC ، محرك سيرفو ، محرك متدرج كمصدر للقيادة ، ويمكن أيضًا تثبيت جهاز تشفير. يمكن استخدام علبة التروس الكوكبية أو علبة التروس البلاستيكية أو علبة التروس المعدنية أو علبة التروس الدودية أو علبة التروس ذات المحور المتوازي أو علبة التروس الأسطوانية كمخفض. المعلمات ، مثل طاقة الخرج ، وسرعة الخرج ، ونسبة التخفيض ، وعزم الدوران الناتج ، والجهد المقنن ، والأقطار ، وهيكل علبة التروس ، وضوضاء النقل ، ودقة النقل ، ودرجة حرارة التشغيل مطورة خصيصًا. ZHAOWEI Machinery & Electronics Co. ، Ltd ملتزمة بتوفير تطوير محركات التروس وأنظمة محرك التصنيع للروبوت الذكي مع المعلمات التقنية المخصصة (القطر: 3.4mm-38mm ، الجهد: أقل من 24V ، طاقة الإخراج: أقل من 50W ، سرعة الإخراج: 5rpm- 2000 دورة في الدقيقة ، نسبة التروس: 5-1500). عزم الإخراج: 1.0 gf.cm-50kgf.cm. يكون رد الفعل العكسي لعلبة التروس في غضون 1-2 دقيقة قوسية ، وضوضاء ناقل الحركة أقل من 45 ديسيبل.
معلمات محرك الجير الآلي:
| مواد | معدن |
|---|---|
| القطر الخارجي | 38 ملم |
| درجة حرارة التشغيل | -30 درجة مئوية ~ + 100 درجة مئوية |
| اتجاه الدوران | cw & ccw |
| رد فعل عنيف جير | ≤2 درجة |
| الجهد (اختياري) | 3 فولت ~ 24 فولت |
| تحمل | تحمل مسامية / تحمل المتداول |
| سرعة الإدخال | ≤15000 دورة في الدقيقة |
| نهاية محورية | ≤0.1 ملم / ≤0.1 ملم |
| تيار | 300mA كحد أقصى |
| شعاعي الحمل على رمح الإخراج | ≤120N / ≤180N |
| المحركات (اختياري) | السائر / DC / محرك سيرفو |
التخصيص
اسم المشروع: روبوت ويل موتور
خلفية المشروع: تنقسم الروبوتات إلى نوع العجلة ونوع الساق ونوع الزاحف ونوع الثعبان والنوع المركب وفقًا لوضع الحركة. من بينها ، تحتل الروبوتات ذات العجلات موقعًا مهمًا نسبيًا في مجال الروبوتات المتنقلة المستقلة. تتميز بخصائص الحركة السريعة والتحكم البسيط وتستخدم على نطاق واسع في خطوط إنتاج منصات التحميل الأوتوماتيكية والمركبات غير المأهولة وغيرها من المجالات.
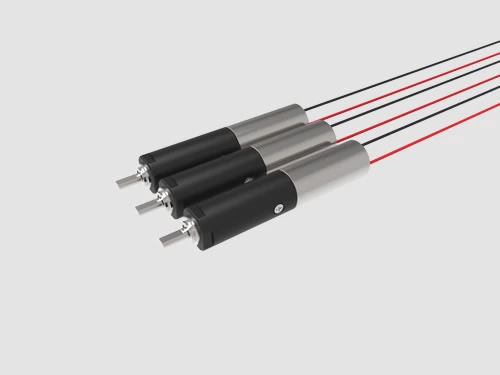
الإنجاز الفني: يعتمد جزء القيادة للروبوت ذي العجلات مزيجًا من محرك DC وعلبة تروس كوكبية 38 مم مع طريقة التثبيت المضادة للتماثل. (محرك متدرج لعجلات الروبوت هو نوع شائع أيضًا.) يمكن أن تقلل هذه الطريقة من قوة عمود الإخراج للمخفض ، وتقصير قاعدة العجلات بشكل كبير ، وتوفر مساحة بشرط أن تكون مجموعة العجلة متحدة المحور وتحتاج إلى طاقة كبيرة (بشكل عام ، يكون حجم المحرك وقوته في نسبة معينة). بهذه الطريقة ، يمكن أن يكون محرك عجلة الروبوت صغير الحجم.