روبوتات المستودعات الذكية عبارة عن روبوتات تم تطويرها لتلبية تخصيص الرف ، والفرز والتكامل في المستودعات الكبيرة. المنتج يدرك حقًا وضع العمل "من الرف إلى الشخص" ، والذي يتكون أساسًا من جسم الإنسان الآلي وأجهزة استشعار الملاحة المرئية. يمكن لروبوت المستودع الذكي رفع الأرفف المليئة بالبضائع أو الكتب ونقل الأرفف بسرعة وسلاسة إلى الموقع المحدد. بعد اكتمال العملية ، سيضع روبوت المستودع الرف في المكان المخصص لانتظار المهمة التالية.
يمكن فرز البضائع الموجودة على الرفوف وفقًا لجدولة وحدة التحكم ، ويمكن تجميع المنتجات المماثلة على نفس الرف ، مما يقلل من وقت تسليم البضائع ويحسن الكفاءة بشكل كبير. مستودع المحركات الكهربائية عبارة عن محرك تروس يمكن استخدامه للنقل والمناولة والفرز في نظام المستودعات اللوجستية الذكية الحديثة. لديها مزايا القوة الدافعة الكبيرة ، السرعة الأسرع ، التشغيل المستقر والضوضاء المنخفضة. تستخدم سيارة الروبوت محرك سيرفو منخفض الجهد مع استجابة سريعة ، وتقصير وقت الفرز.

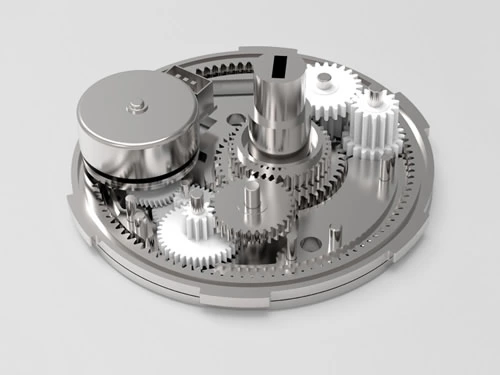
تم دمج نظام النقل الرئيسي لمستودع المحركات الصغيرة بواسطة محرك محرك (محرك صغير) وعلبة تروس (مخفض). يمكن استخدام محرك DC مصقول ، ومحرك DC بدون فرش ، ومحرك متدرج ، ومحرك بدون قلب ، ومحرك مؤازر كمصدر للقيادة ، ويمكن أيضًا تثبيت جهاز تشفير. يمكن استخدام علبة التروس الكوكبية أو علبة التروس البلاستيكية أو علبة التروس المعدنية أو علبة التروس الدودية أو علبة التروس ذات المحور المتوازي أو علبة التروس الأسطوانية كمخفض. المعلمات ، مثل طاقة الخرج ، وسرعة الخرج ، ونسبة التخفيض ، وعزم الدوران الناتج ، والجهد المقنن ، والأقطار ، وهيكل علبة التروس ، وضوضاء النقل ، ودقة النقل ، ودرجة حرارة العمل مطورة خصيصًا. تلتزم شركة ZHAOWEI Machinery & Electronics Co. ، Ltd بتوفير وتصنيع محرك تروس لروبوتات المستودعات بمعايير تقنية مخصصة (القطر: 3.4 مم -38 مم ، الجهد: أقل من 24 فولت ، طاقة الخرج: أقل من 50 وات ، سرعة الإخراج: 5 دورة في الدقيقة - 2000 دورة في الدقيقة ، السرعة النسبة: 5-1500 ، عزم الدوران الناتج: 1.0 gf.cm -50kgf.cm). دقة دوران علبة التروس هي 1-2 دقيقة قوس ، وضوضاء ناقل الحركة أقل من 45 ديسيبل.
معلمات محرك الجير لروبوتات المستودعات:
| مواد | بلاستيك |
|---|---|
| القطر الخارجي | 12 ملم |
| درجة حرارة التشغيل | -20 ℃ ~ + 85 ℃ |
| اتجاه الدوران | cw & ccw |
| رد فعل عنيف جير | ≤3 درجة |
| الجهد (اختياري) | 3 فولت ~ 24 فولت |
| تحمل | تحمل مسامية / تحمل المتداول |
| سرعة الإدخال | ≤ 30000 دورة في الدقيقة |
| نهاية محورية | ≤0.3 مم / ≤0.2 مم |
| تيار | 250mA كحد أقصى |
| شعاعي الحمل على رمح الإخراج | ≤5N / ≤10N |
| المحركات (اختياري) | السائر / DC / محرك سيرفو |
مشروع التخصيص
الاسم: محرك موجه للروبوت ذي العجلات
خلفية المشروع: يمكن أن تعمل الروبوتات الذكية وفقًا لإجراءات أو برامج مرتبة مسبقًا تم إنشاؤها بواسطة تقنية الذكاء الاصطناعي. يمكن أن تحل المنتجات الذكية الناضجة محل الإنسان ، مثل الإنتاج أو البناء أو العمل الخطير. تنقسم الروبوتات إلى نوع العجلة ونوع الساق ونوع الزاحف ونوع الثعبان والنوع المركب وفقًا لوضع الحركة. من بينها ، تحتل الروبوتات ذات العجلات موقعًا مهمًا نسبيًا في مجال الروبوتات المتنقلة المستقلة. تتميز بخصائص الحركة السريعة والتحكم البسيط ، وتستخدم على نطاق واسع في خطوط إنتاج منصات التحميل الأوتوماتيكية ، والمركبات غير المأهولة وغيرها من المجالات.
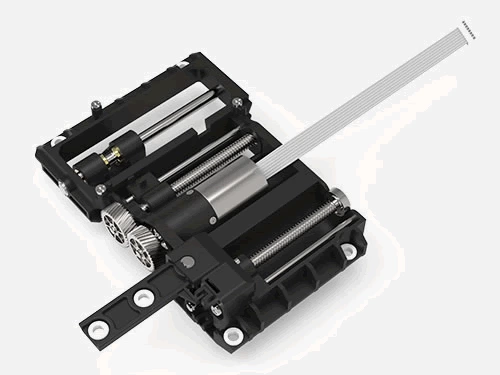
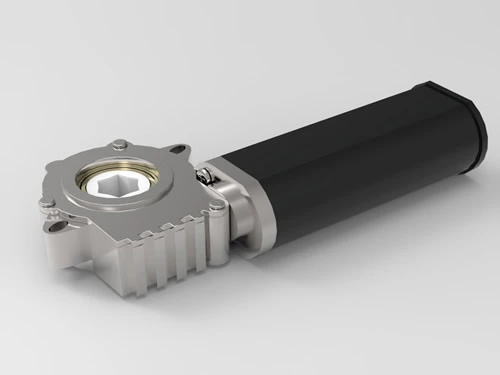
الدعم الفني: يعتمد جزء القيادة للروبوت ذي العجلات مزيجًا من محرك DC وعلبة تروس كوكبية 38 مم ، وطريقة تثبيت غير متماثلة. يمكن أن تقلل هذه الطريقة من نقطة قوة عمود الإخراج لمحركات بدون فرش في مستودع الروبوت ، وتقصير قاعدة العجلات بشكل كبير ، وتوفر مساحة بشرط أن تكون مجموعة العجلات متحدة المحور وتوفر طاقة أكبر (عادةً ما يكون حجم المحرك وقوته في حالة معينة نسبة).
الإنجاز: بناءً على الاختبار الميداني والتحليل النظري ، فإن ضعف القدرة على التسلق ناتج بشكل أساسي عن القوة الدافعة غير الكافية لنظام القيادة. سبب نقص القوة الدافعة هو أن عامل الاحتكاك لقضيب التوجيه الخطي المحدد في مرحلة التصميم مثالي للغاية. من أجل حل التغيير في عامل الاحتكاك لسكة التوجيه بعد زيادة حمل النظام ، فإن علبة التروس الكوكبية لدينا بها مرحلتين ، ثلاث ، أربع مراحل يمكن أن تغير نسبة التخفيض وتعديل سرعة الإدخال وعزم الدوران لعلبة التروس وفقًا لـ متطلبات مستودع المحركات الصغيرة ومحرك تروس الروبوت ذي العجلات.